A physical object, i.e. with physics properties (e.g. collisions) modelled by Box2D. More...
#include <objects.h>
Public Member Functions | |
| PhysicalObject (uint16_t _id, float _x, float _y, ObjectGeometry &geom, float _linear_damping=0.0f, float _angular_damping=0.0f, float _density=10.0f, float _friction=0.3f, float _restitution=0.5f, std::string const &_category="objects") | |
| Constructs a PhysicalObject. | |
| PhysicalObject (Simulation *simulation, uint16_t _id, float _x, float _y, Configuration const &config, std::string const &_category="objects") | |
| Constructs a PhysicalObject from a configuration entry. | |
| virtual void | launch_user_step (float t) override |
| Launches the user-defined step function. For PhysicalObject, it is also used to compute acceleration statistics. | |
| virtual b2Vec2 | get_position () const |
| Retrieves the object's current position. | |
| float | get_angle () const |
| Retrieves the object's current orientation angle. | |
| float | get_angular_velocity () const |
| Retrieves the object's current angular velocity. | |
| b2Vec2 | get_linear_acceleration () const |
| Retrieves the object's current angular velocity. | |
| virtual void | render (SDL_Renderer *renderer, b2WorldId world_id) const override=0 |
| Renders the object on the given SDL renderer. | |
| virtual void | move (float x, float y, float theta=NAN) override |
| Move the object to a given coordinate. | |
| virtual bool | is_tangible () const override |
| Returns whether this object is tangible (e.g. collisions, etc) or not. | |
| virtual void | create_serialization_fields (DataLogger *data_logger) override |
| Create serialization fields of the data logger. | |
| virtual void | serialize_base_values (DataLogger *data_logger, double t) override |
| Save base values of the object into a data logger row. | |
| virtual arena_polygons_t | generate_contours (std::size_t points_per_contour=0) const override |
| Return one or more polygonal contours that represent the geometry of the object. | |
| Public Member Functions inherited from Object | |
| Object (float _x, float _y, ObjectGeometry &_geom, std::string const &_category="objects") | |
| Constructs an Object. | |
| Object (Simulation *simulation, float _x, float _y, Configuration const &config, std::string const &_category="objects") | |
| Constructs an Object from a configuration entry. | |
| virtual | ~Object () |
| Destructor. | |
| void | init (b2WorldId world_id) |
| Launch virtual function 'do_init' that will perform base initialization (e.g. create Box2D objects). | |
| bool | is_initialized () const noexcept |
| Check if the object was correctly initialized yet. | |
| ObjectGeometry * | get_geometry () |
| Return the object's geometry. | |
Public Attributes | |
| uint16_t | id |
| Object identifier. | |
| Public Attributes inherited from Object | |
| float | x |
| X position. | |
| float | y |
| Y position. | |
| float | theta |
| Orientation (in rad). | |
| std::string | category |
| Category of the object. | |
Protected Member Functions | |
| virtual void | do_init (b2WorldId world_id) override |
| Perform the base initialization (e.g. create Box2D objects). Called once by init(world_id). | |
| virtual void | parse_configuration (Configuration const &config, Simulation *simulation) override |
| Parse a provided configuration and set associated members values. | |
| virtual void | create_body (b2WorldId world_id) |
| Creates the object's physical body in the simulation. | |
Protected Attributes | |
| float | linear_damping |
| float | angular_damping |
| float | density |
| float | friction |
| float | restitution |
| b2BodyId | body_id |
| Box2D body identifier. | |
| float | _estimated_dt = 0.0f |
| float | _last_time = 0.0f |
| b2Vec2 | _prev_v = {NAN, NAN} |
| b2Vec2 | _lin_acc = {NAN, NAN} |
| Protected Attributes inherited from Object | |
| ObjectGeometry * | geom |
| Geometry of the object. | |
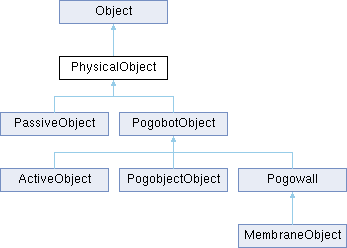
Detailed Description
A physical object, i.e. with physics properties (e.g. collisions) modelled by Box2D.
Constructor & Destructor Documentation
◆ PhysicalObject() [1/2]
| PhysicalObject::PhysicalObject | ( | uint16_t | _id, |
| float | _x, | ||
| float | _y, | ||
| ObjectGeometry & | geom, | ||
| float | _linear_damping = 0.0f, | ||
| float | _angular_damping = 0.0f, | ||
| float | _density = 10.0f, | ||
| float | _friction = 0.3f, | ||
| float | _restitution = 0.5f, | ||
| std::string const & | _category = "objects" ) |
Constructs a PhysicalObject.
- Parameters
-
_id Unique object identifier. x Initial x-coordinate in the simulation. y Initial y-coordinate in the simulation. geom Object's geometry. _linear_damping Linear damping value for the physical body (default is 0.0f). _angular_damping Angular damping value for the physical body (default is 0.0f). _density Density of the body shape (default is 10.0f). _friction Friction coefficient of the body shape (default is 0.3f). _restitution Restitution (bounciness) of the body shape (default is 0.5f). category Name of the category of the object.
◆ PhysicalObject() [2/2]
| PhysicalObject::PhysicalObject | ( | Simulation * | simulation, |
| uint16_t | _id, | ||
| float | _x, | ||
| float | _y, | ||
| Configuration const & | config, | ||
| std::string const & | _category = "objects" ) |
Constructs a PhysicalObject from a configuration entry.
- Parameters
-
simulation Pointer to the underlying simulation. _id Unique object identifier. x Initial x-coordinate in the simulation. y Initial y-coordinate in the simulation. config Configuration entry describing the object properties. category Name of the category of the object.
Member Function Documentation
◆ create_body()
|
protectedvirtual |
Creates the object's physical body in the simulation.
Constructs a dynamic body in the Box2D world at the specified position, defines its shape based on the provided geometry.
- Parameters
-
world_id The Box2D world identifier.
◆ create_serialization_fields()
|
overridevirtual |
Create serialization fields of the data logger.
- Parameters
-
data_logger Pointer to a DataLogger used for serialization
Reimplemented from Object.
Reimplemented in MembraneObject, and PogobotObject.
◆ do_init()
|
overrideprotectedvirtual |
Perform the base initialization (e.g. create Box2D objects). Called once by init(world_id).
- Parameters
-
world_id The Box2D world identifier.
Reimplemented from Object.
Reimplemented in MembraneObject, PogobjectObject, PogobotObject, Pogowall, and RectMembraneObject.
◆ generate_contours()
|
overridevirtual |
Return one or more polygonal contours that represent the geometry of the object.
- Parameters
-
points_per_contour Desired number of vertices for each contour (a rectangle has one contour, a disk has one, an arena may have many – one per wall).
- Returns
- arena_polygons_t A vector of closed polygons (counter‑clockwise, last vertex different from the first – the caller may close the loop if needed).
Reimplemented from Object.
Reimplemented in MembraneObject, and RectMembraneObject.
◆ get_angle()
| float PhysicalObject::get_angle | ( | ) | const |
Retrieves the object's current orientation angle.
Computes and returns the orientation angle (in radians) of the object's body.
- Returns
- float The orientation angle.
◆ get_angular_velocity()
| float PhysicalObject::get_angular_velocity | ( | ) | const |
Retrieves the object's current angular velocity.
- Returns
- float The angular velocity
◆ get_linear_acceleration()
| b2Vec2 PhysicalObject::get_linear_acceleration | ( | ) | const |
Retrieves the object's current angular velocity.
- Returns
- float The angular velocity
◆ get_position()
|
virtual |
Retrieves the object's current position.
Returns the position of the object's physical body as a Box2D vector.
- Returns
- b2Vec2 The current position.
Reimplemented in MembraneObject, and RectMembraneObject.
◆ is_tangible()
|
inlineoverridevirtual |
Returns whether this object is tangible (e.g. collisions, etc) or not.
Reimplemented from Object.
Reimplemented in MembraneObject, and Pogowall.
◆ launch_user_step()
|
overridevirtual |
Launches the user-defined step function. For PhysicalObject, it is also used to compute acceleration statistics.
Reimplemented from Object.
Reimplemented in PogobotObject.
◆ move()
|
overridevirtual |
Move the object to a given coordinate.
Reimplemented from Object.
Reimplemented in MembraneObject, Pogowall, and RectMembraneObject.
◆ parse_configuration()
|
overrideprotectedvirtual |
Parse a provided configuration and set associated members values.
- Parameters
-
config Configuration entry describing the object properties.
Reimplemented from Object.
Reimplemented in ActiveObject, MembraneObject, PassiveObject, PogobotObject, and RectMembraneObject.
◆ render()
|
overridepure virtual |
Renders the object on the given SDL renderer.
- Parameters
-
renderer Pointer to the SDL_Renderer. world_id The Box2D world identifier (unused in rendering).
Implements Object.
Implemented in ActiveObject, MembraneObject, PassiveObject, PogobjectObject, PogobotObject, Pogowall, and RectMembraneObject.
◆ serialize_base_values()
|
overridevirtual |
Save base values of the object into a data logger row.
- Parameters
-
data_logger Pointer to a DataLogger used to serialize base values
Reimplemented from Object.
Reimplemented in MembraneObject, PogobotObject, and RectMembraneObject.
Member Data Documentation
◆ _estimated_dt
|
protected |
◆ _last_time
|
protected |
◆ _lin_acc
|
protected |
◆ _prev_v
|
protected |
◆ angular_damping
|
protected |
◆ body_id
|
protected |
Box2D body identifier.
◆ density
|
protected |
◆ friction
|
protected |
◆ id
| uint16_t PhysicalObject::id |
Object identifier.
◆ linear_damping
|
protected |
◆ restitution
|
protected |
The documentation for this class was generated from the following files:
- src/pogosim/objects.h
- src/pogosim/objects.cpp